Neben der von ihr entwickelten Software zur kamerabasierten Positionsbestimmung bietet die IPS auch damit verbundene Dienstleistungen an.
Zu diesen zählen zum einen die Ausführung von Aufgaben, wie die Anpassung und Integration der angebotenen Software in Kunden-Anwendungen, und zum anderen Beratungsleistungen, beispielsweise bei der Auswahl geeigneter Komponenten (Kameras/Objektive) für eine vorliegende Anwendung.
Zudem wird als Dienstleistung auch Beratung zur Durchführung der intrinsischen und extrinsischen Kalibrierung von Kameras angeboten.
Der angebotene ROS Positionsbestimmungs-Node ist eigentlich als möglichst generisch konzipiert und nicht auf beispielsweise ein bestimmtes Kamera-Modell oder eine bestimmte Kamera-Schnittstelle festgelegt, sondern unterstützt alle der auch von ROS unterstützten Bild-Übertragungs-Formate bzw. Kamera-Schnittstellen als Eingangs-Schnittstelle, sowie alle Pose-/Transform-Formate, welche in ROS üblich sind, als Ausgangs-Schnittstelle.
Sollte dennoch eine kundenspezifische Änderung/Erweiterung der Schnittstellen oder spezielle zusätzliche Funktionen gewünscht werden, so bieten wir dies selbstverständlich gerne an.
Gerne bieten wir Unterstützung bei der Integration des angebotenen ROS-Nodes in Ihr Robotik-System.
Dabei steht zunächst die Portierung auf die verwendete ROS- und Linux-Distribution und die Automatisierung der Installation aller benötigten Dependencies über eine Debian Software Package (".deb") im Fokus.
Darüber hinaus bieten wir Unterstützung beim erstellen einer für Ihren Anwendungsfall passenden Version des Launch-Skripts des ROS-Nodes.
Egal ob bei der Installation der externen Dependencies oder bei der Verwendung bestimmter Hardware Probleme auftreten, freut es uns falls es uns gelingt, durch unsere vorige Erfahrung und einen anderen Blickwinkel, dabei zu helfen, diese Probleme schnell zu identifizieren und zu lösen.
Die Vermessung der Marker-Positionen kann bei räumlich weiter verteilten Markern mittels einer Totalstation, von einem Vermessungstechniker oder einer entsprechend in der Vermessung mit einer solchen geschulten Person, durchgeführt werden.
Damit dieser/diese jedoch genau weiß, was für Messungen konkret benötigt werden, bietet die IPS an die vermessende Person darüber zu unterrichten, welche Art von Messungen, für die Erstellung der Marker-Koordinaten-Liste, genau durchgeführt werden müssen.
Voraussetzung für eine genaue Positionsbestimmung ist eine korrekte Kalibrierung der verwendeten Kameras.
Dies Umfasst zum einen die intrinsische Kalibrierung, also die Bestimmung der Kamera-Optik-Parameter, und zum anderen die extrinsische Kalibrierung, also die Bestimmung der Verbau-Pose der Kamera im zu lokalisierenden Fahrzeug/Objekt.
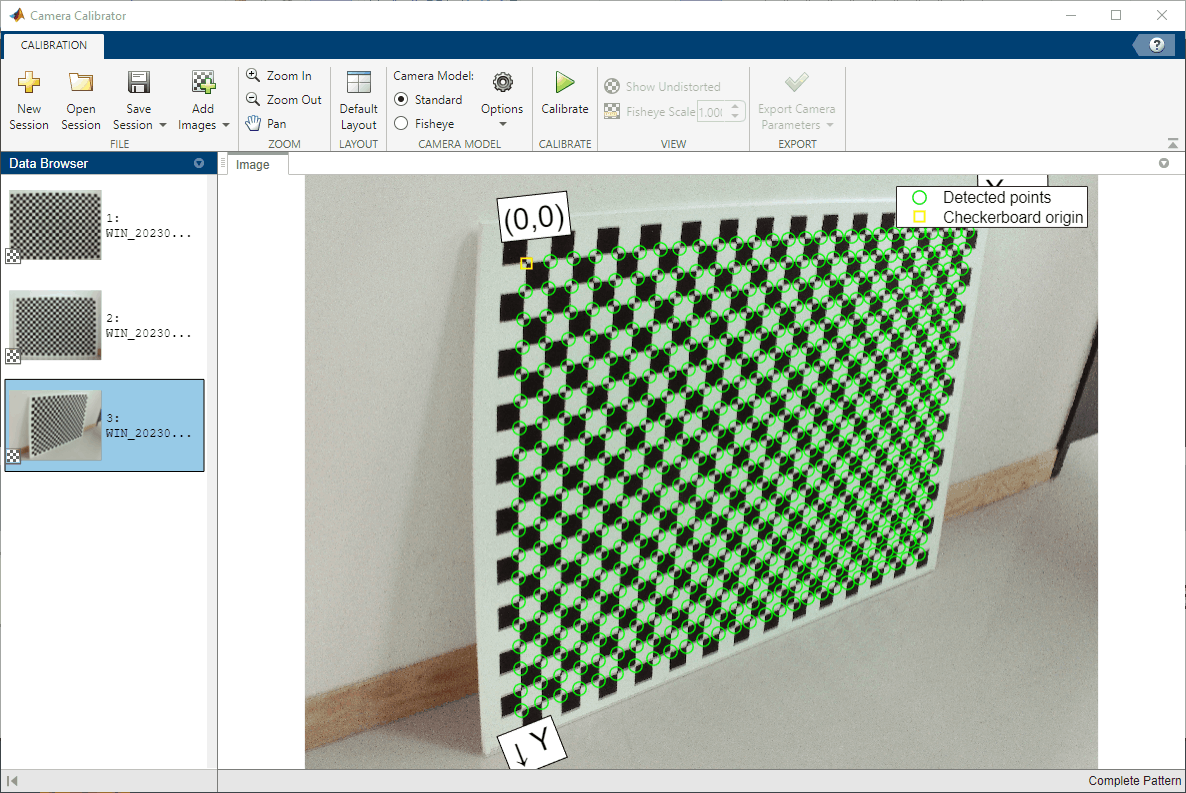
Um diese beiden Typen von Kalibrierungs-Parametern zu bestimmen verwenden wir die Matlab-"Single Camera Calibrator App" da diese eine umfassende und angenehm zu bedienende Benutzeroberfläche besitz und da diese durch die integrierte Backwards-Projection Funktion auch die Möglichkeit bietet den Fehler der intrinsischen Kalibrierung zu bestimmen und zu bewerten.
Abbildung: Benutzeroberfläche der verwendeten MATLAB Camera-Calibrator-App
Der Test einer Software sollte nie alleine von der Entwickler-Seite durchgeführt werden. Ein Black-Box test der Schnittstellen durch eine Person, welche nicht an der Entwicklung des Programmes beteiligt war, wird immer empfohlen.
Dennoch kann es dem Auffinden von Fehlern und Corner-Cases dienlich sein, wenn auch auf die von der Entwickler-Seite zur internen Absicherung entworfenen Tests zugegriffen werden kann.
Daher stellt die IPS ihren Kunden auch ihre intern entwickelten Test-Methoden zur Verfügung und bietet Ihnen auch an, für Sie auf Basis dieser eine vollständige Validierung der vorliegenden Software durchzuführen und einen Report mit deren Ergebnisse zu erstellen.
Wir beantworten diese gerne, bzw. freuen uns auch, eine allgemeine Beratung über die Vor- und Nachteile der Verwendung kamerabasierter Positionsbestimmung zu geben.
Unverbindlich: